






Introduction
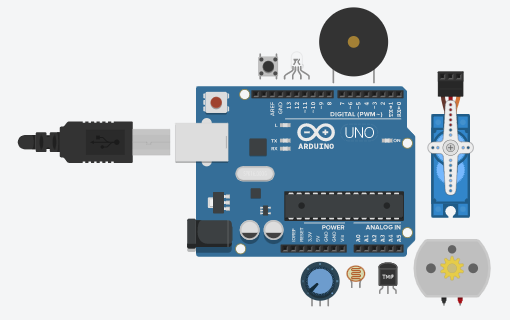
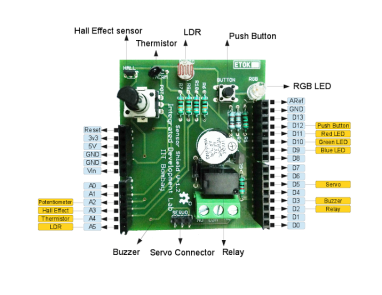
Arduino is a free/libre and open-source hardware platform for electronics prototyping which is very popular in academia as well as in industry. The FLOSS-Arduino is a series of books that explains how to control Arduino using Free/Libre Open Source Software like Arduino IDE, Scilab, Xcos, Python, Julia and OpenModelica. The FLOSS-Arduino interface helps the user to perform embedded systems experiments using Arduino Uno board with various components like LED, sensors, actuators, potentiometer, DC motor, etc. The source code required for performing various experiments are given in this book. The same source code is also available in the Downloads tab of this website.
To follow the instructions given in the book you have to install the below software with the specified version in Linux 18.04 or Windows 8/10 OS.
-
Arduino IDE 1.8
-
Python 3.5
-
Scilab/Xcos 5.5.2
-
OpenModelica 1.17.0
-
Julia 1.6.0